Regularly, I do write about the adventures of a student internship or graduation that I am involved in. And it really helps those young aspiring engineers to be in the limelight of attention. Today there is a different story on my website, the 25 year work anniversary of my esteemed colleague Ewout van Duursen1. A fitting opportunity to celebrate his achievements during his long career at Damen Dredging Equipment. Ewoud’s specialties are drive systems and programming. And especially in applications for trailing suction hopper dredges. One of the products he has been working on tirelessly are hopper process monitoring systems2.

A good TSHD monitoring system will show a number of processes for operating a trailing suction hopper dredge.
- Trailing suction pipe visualisation
- Pump performance monitoring
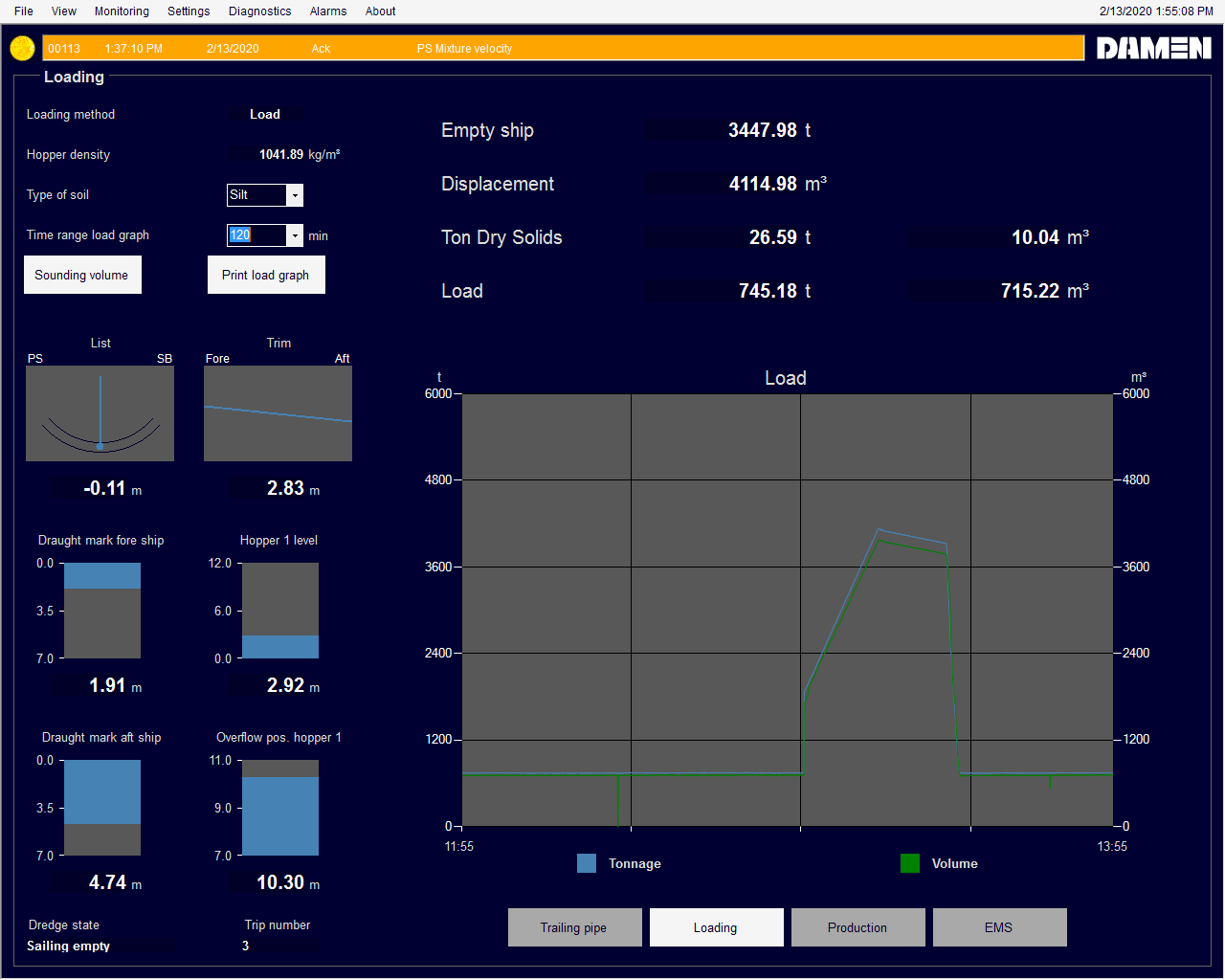
- Hopper loading monitoring and draught measurement
- Survey and positioning
- Recording and reporting
One aspect I want to highlight is the hopper loading and draught measurement. There are some details that might be confusing at first.
Take for instance a nominally 1000 cube hopper. It may be rectangular 32 m long, 9 m wide and 4 m deep, without any obstructions for simplicity. The mathematical capacity would be 1152 m³. But you don’t want to have the cargo spilling over the coaming. The maximum water level might be 0.5 m below the coaming making the volume 1008 m³. The maximum height of the telescopic overflow may be 0.7 m below the coaming level, as the water draws down about 0.2 m from stagnation level to the rim of the overflow. This measurable volume is now 950 m³.
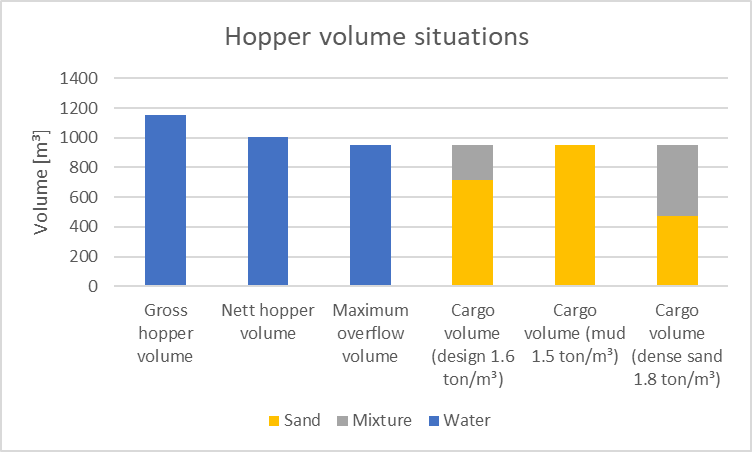
And the cargo does not only have volume, it also has a mass. And as Archimedes already discovered, mass displaces its weight in volume of water. During design of the vessel and the hopper, the loaded sand is assumed to have a certain density, e.g. 1.6 ton/m³. But the density for the hopper may only be 1.5 ton/m³, as one has to accommodate for the transport water that also enters the hopper. So, you can’t fill the 950 m³ with 1521 ton of sand. The vessel can only carry 1426 ton of total cargo. This is 713 m³ sand of 1.6 ton/m³ and 237 m³ mixture of 1.2 ton/m³. It sounds disappointing when your 1000 cube hopper only carries 713 m³ of valuable sand. The 1.5 ton/m³ hopper density is rather low and the vessel is probably more intended for silt and mud with a lower in situ density. With mud of 1.5 ton/m³ density, you can load the hopper to the rim. And when you encounter heavier sand with e.g. a density of 1.8 ton/m³, don’t try to fill the hopper with this 713 m³ mentioned before. You’ll sink your ship. A good hopper loading monitoring system will enable you to monitor filling of the hopper to the maximum safe cargo capacity.
Heavy weather dredging (Retrieved from YouTube 18/10/2012, unknown source)
References
- DDE celebrates 25 year anniversary of Ewout van Duursen, Linkedin
- Monitor your dredging process: Optimise your TSHD dredge cycle times, Damen
See also
Dredging equipment and technology – Chap2: Trailing suction hopper dredger, CEDA